活用例(海中構造物の腐食検知)
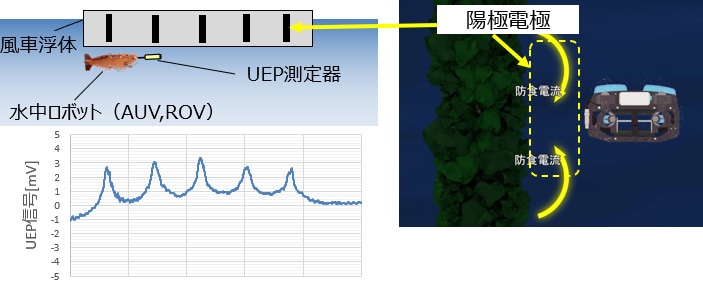
特徴:海洋生物を除去せず、水中ロボットに搭載して非接触腐食検査が可能
課題
- 海中構造物(鋼材)の腐食、亀裂、損傷の健全性評価を定期的に実施する必要があるが、広大な検査範囲を効率的に評価する必要あり。
- 海中構造物(鋼材)には海藻やフジツボといった生物が付着するため、従来の目視による腐食点検には海洋生物の剥離が必要。剥離には潜水士による除去作業や高圧ジェット等の機材が必要で、時間を要する作業となる。
UEPセンサを用いた解決手法
- 水中ロボットを利用した効率的な非接触での腐食検査手法が確立できる。
- 海洋生物を剥がすことなく、腐食兆候の検知が可能となり、作業時間/コストの低減が可能。
お問い合わせ先
営業本部 インダストリー営業部 システムソリューションG
| : | jiki@group.shimadzu.co.jp | |
| TEL | : | 東京支社 03-3219-5852 |